  
|
|
 |
|
The goal of this assignment is to write our own
software for the Pioneer 1 robot that will allow it to
autonomously navigate the Libra Complex, locate soda cans, and
bring them to a designated drop off point.
| |
 |
|
|
|
Proposal
The Use of Subsumption Architecture to Program
a Pioneer 1 Robot to Autonomously Locate and Retrieve Soda
Cans Located in the Libra Complex
Ross Luengen and Seema Patel
Harvey Mudd
College, Claremont, CA
Objective
The objective of this project is to implement
the subsumption based robot control architecture proposed by
Rodney Brooks of MIT on the ActivMedia Pioneer 1 Robot to
complete a soda can retrieval task.
Abstract
Rodney Brooks' subsumption based control
architecture will be implemented in a fairly standard coding
environment to produce an emergent behavior of object
retrieval. The program will run on a laptop using FreeBSD and
communicate via serial connection with an ActivMedia Pioneer 1
robot. A USB camera will be used to gain visual stimuli for
object location. Using an inheritance schema, modular
behaviors will simultaneously run to manage various sensors
depending on the behavior's purpose. Ultimately, the robot
will be able to autonomously avoid all objects while searching
for a soda can, locate and retrieve the can, and then return
to a designated drop zone. The implementation will provide
complete external control of the Pioneer (no pre-built
software) as well as provide a very generic platform for
future applications on other hardware or emergent behavioral
systems.
Introduction
The Subsumption control paradigm will be
implemented for the ActivMedia Pioneer 1 on a FreeBSD 4.2
based laptop in c++. The project is broken into three major
sections. First, the control software will be implemented for
the Pioneer 1 via a serial connection. This includes
implementing two-way serial communications for sensor data and
control commands. Secondly, a behavioral system will be
wrapped around the control code. This system will control the
hold and release mechanisms discussed in Brooks' paper.
Thirdly, actual behaviors will be developed for the following
desired effects; battery power saver, avoid obstacles/walls,
reflexive grasp mechanism, collision handling, wander/explore,
soda vision identification, and return home. The combination
should result in highly a complex behavior capable of adapting
to new and unknown environments, and should be an interesting
exploration into the field of robot control paradigms.
This solution provides many different
intriguing aspects of robotics. We hope to construct a very
high level behavior from fairly simple programming.
Hierarchical robotic design requires huge assumptions
regarding the environment to allow for proper robotic
planning. We hope to evolve a system that his highly adaptive,
both for our project and something that is highly useful and
malleable for future robotic applications. Much of the
programming structure we are striving for is independent of
robotic platform or behavior objectives. Our behaviors will
serve as a proof of concept, showing the usefulness and
modularity provided by our programming scheme.
If properly implemented, our project has many
practical applications both in our software schema and in the
real world. A common use for such highly autonomous mobile
robotics is the retrieval of objects in locations too
dangerous and too difficult for humans to travel. This
includes space, toxic and nuclear hot spots, caves and
crevasses, collapsed buildings, or any number of other places.
In its conception, our control code is modular enough that our
robot will be capable of recognizing any number of objectives,
and will not limited to soda cans. Any number of smaller
behaviors can be modified, added, or removed to result in
different emergent behavior. In addition, our code will be
usable by future robotic projects wishing to take advantage of
either the reaction or the hybrid control models.
A discussion of materials needed as well as a
timeline for development will follow an explanation of past
work, related work, goals of the project, and a work plan.
Past Work and Related Work
Rodney Brooks first conceived subsumption
architecture at MIT in the mid 1980's as a reaction to the
difficulties in hierarchical design as a practical technical
solution for implementing behavior patterns. His idea assigns
specific priority levels to behavior mechanics thereby solving
conflicting decisions. If two behaviors come to conflict
regarding a certain movement, one will take priority according
to a pre-determined setting. For example, squirrels exhibit
"obtain food" and "avoid human" behaviors. In Brooks'
architecture, one behavior, "obtain food", would be given
priority. Although the avoid human behavior commands a
squirrel to avoid a human feeding nuts, the obtain food
behavior takes priority, and the squirrel quickly snatches the
food from the human. While this may not be how thinking
entities work, this viewpoint is easily implemented on robotic
machines.
Our project takes on the application of Brooks'
theory in a universal programming environment. An open source,
c++ framework for the subsumption architecture will provide
universal programmability for the community. By simply
replacing the control class, any robot (including a
simulation) can be driven with our behavior code.
Additionally, our architecture makes modifications simple and
highly modular.
Goals of Present Work and Work Plan
Our goals for this project are to write
software that will allow a Pioneer 1 robot to autonomously
navigate through the Libra Complex, locate a soda can,
verbalize the fact that it has located a can, and return the
can to a drop zone. The emergent behavior will be a
combination of many localized behaviors, each of which are
unknowing of the others' existence. These behaviors will be
constructed as small and individual as possible in order to
increase the adaptability of the system and to further expand
Brooks' theoretical architecture.
The robot control architecture is designed to
implement all the operability of the ActivMedia Pioneer 1
robot including the optional gripper package. It will store
state variables according to the on board sensors, thereby
representing current sensor states and not a representation of
the world. Functions will be provided for operability of the
robot. First, the serial connection between the robot and the
computer will be initiated. This will be facilitated by three
commands - two sync commands and an open command as specified
by the ActivMedia manual. Secondly, an interface will be
developed for all command structures present in the pioneer
robot. A list of these commands is found in figure 1, while
the command structure is found in figure 2.
Secondly, update packets will be received from
the robot itself. These include sensor updates from the robot,
including physical position, wheel velocity, sonar readings,
gripper states, wheel stall status, bump sensors, and other
information. This packet structure is defined in figure 3. The
code operating the packet will be handled in a separate thread
that will consistently query the robot for new data.
Furthermore, this code will send a command to the robot
indicating the attached computer is still alive and wishing
new data.
With the control software written, the project
will move to implementation and integration of behavior code.
Much of this code will be borrowed from the robotics team9s
effort to implement subsumption architecture on its robots.
The code will be debugged and extended for full functionality.
The code will use a behavior manager that decides which
behavior thread needs to be halted (via a semaphore) and which
threads can be allowed to continue at each point and time.
This will also include a behavior class from which extended
behaviors can be implemented. The inheritance from this class
will provide modularity and will facilitate the simple
inclusion of new behaviors into the entire schema.
Finally, behaviors will be implemented to
achieve our goal. These behaviors will range in complexity
from simple collision behaviors that will manage and respond
to the bump sensors, to behaviors that will manage our USB
camera. To avoid battery drain a behavior will monitor battery
usage and warn against complete system failure due to battery
problems. Another system will manage the proximal sonar
readings to make sure any object is not too close. If an
object gets to close to the robot, the behavior will direct
the robot away from the obstacle. Above everything is an
explore or wander behavior which will randomly move the robot
through the environment regardless of obstacles. The explore
behavior will rely on lower behaviors (or more basic
behaviors) to halt its actions before wandering into an
undesirable state.
The last behavior to mention is the vision
behavior, which will use a USB camera to gain visual
environment clues. This behavior is singled out due to the
inherent complexity of vision algorithms on computers.
Hopefully it will be able to locate and recognize objects
within its field of view, and direct the robot's motion toward
desirable objects. With this functionality, we hope to
demonstrate the universality of our system by providing at
least two object recognition models. This way, our robot will
be able to detect and find completely different types of soda
cans, being able to actively distinguish the difference.
Materials
The primary piece of equipment that we will
require is the ActivMedia Pioneer 1 robot with gripper package
(see figures 4-5 for Pioneer schematics). We will also need a
laptop computer to execute our program (see figure 6 for
mounting diagram), a USB camera to obtain visual images of the
robot's surroundings, and a speech software package to allow
the robot to verbalize commands and information back to the
user. For this project we will use Professor Dodds' research
lab's ActivMedia Pioneer 1 robot, the robotics team's Dell
Inspiron 3800 laptop, the robotics team's D-Link DSB-C300 USB
camera, and an open source speech synthesis package called
Festival. All required equipment listed has been obtained.
Timeline
|
February 5, 2001 |
Completed most of the RobotControl
architecture. Finished basic control commands, including
velocity settings and sonar updates. Major lag time in
all robot commands. |
|
February 16, 2001 |
Received DSB-C300 Camera. Operating under
Linux using ov511 driver. |
|
February 17, 2001 |
Speech synthesis software test program
running properly under Linux. |
|
February 22, 2001 |
Complete the sonar processing software.
Finalize explore, avoid walls, and collision behaviors.
Add grasp and battery behaviors. Integrate the speech
software package. |
|
February 19-24, 2001 |
Re-compile laptop kernel for use with
sound and ov511 USB Camera driver. |
|
March 9, 2001 |
Start visual image processing
software. |
|
April 2, 2001 |
Complete visual tracking software.
Integrate remaining behaviors and start debug
phase. |
|
April 30, 2001 |
Complete subsumption architecture code.
Successfully find, move, and deposit items marked by our
vision recognition software. Complete emergent
task. |
References
ActivMedia Pioneer 1
Robotics Manual.
Brooks, Rodney. Achieving Artificial
Intelligence Through Building Robots. AI Memo 899, MIT
Press, 1986.
Figures
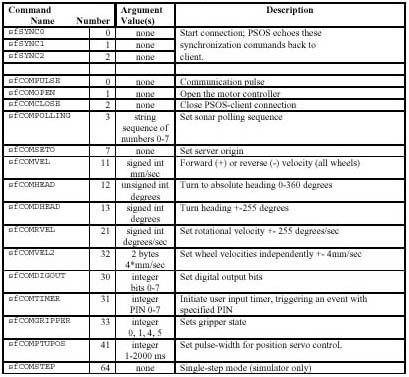
Figure 1:
ActivMedia Pioneer 1 Command List
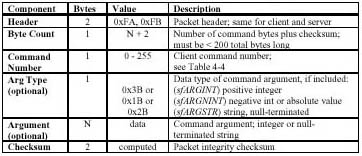
Figure 2:
ActivMedia Pioneer 1 Serial Command Structure

Figure 3:
ActivMedia Pioneer Information Packet Protocol
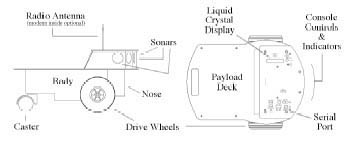
Figure 4:
ActivMedia Pioneer 1 Robot diagram (without gripper
assembly)
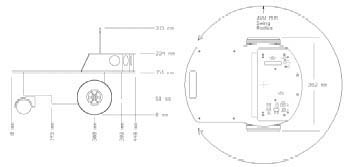
Figure 5:
ActivMedia Pioneer 1 Robot dimensions (without gripper
assembly)
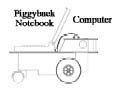
Figure 6:
ActivMedia Pioneer 1 Robot laptop mount configuration (without
gripper assembly)
| |
|
|
|
|
Our Solution
Our solution will be developed over the course
of the spring semester, 2001. We will divide our task into
sub-projects, each of which is due according to the following
schedule:
-
Project 1 - Monday, February 5
-
Project 2 - Monday, February 26
-
Project 3 - Monday, April 2
-
Project 4 - Friday, May 4
| |
|
|
|
|
Project 1
(Ross Luengen and Katie
Ray)
Purpose
The purpose of this project is to bypass the
built-in software and build from scratch the code needed for
relatively simple behaviors.
Objectives
Method
In order to implement the behaviors a large
portion of robot control code needed to be generated. No
Pioneer code was utilized, instead the serial communications
constructs were implemented in c++ on the laptop computer.
Most of the code that was used was taken from the Robotics
team, including a serial communications package and behavior
hierarchy, but a lot of it did not work (and in fact did not
compile). First, this code needed to be brought to operating
order and reasonable integration with each portion. The serial
communications was refined and templated.
The following is a list of brief descriptions
of the functions that were modified/written to control the
robot:
-
Start connection
-
Communication pulse
-
Open the motor controller
-
Set sonar polling sequence
-
Set server origin
-
Forward (+) or reverse (-) velocity
-
Turn to an absolute heading specified
(between 0 and 360)
-
Turn heading +/- 255 degrees
-
Set rotational velocity +/- 255
degrees/sec
-
Set wheel velocities independently +/- 4
mm/sec
-
Set digital output bits
-
Initiate user input timer
-
Set gripper state
-
Set pulse-width for position servo
control
-
Determine x-position and y-position
-
Determine the velocity of each of the
wheels
-
Battery charge
-
Get most recent sonar readings
The behaviors are implemented under the
framework provided by the robotics behavior structure. Each
behavior acts independently in its own thread. Each behavior
can be paused or resumed according to its priority level and
other behaviors' requests.
-
Explore
The explore behavior is ignorant
of sonar sensing data insofar as it's directional value is
concerned. It chooses a random heading to follow within a
certain maximum. After deciding on a heading, it checks to
see how far the sonar readings are in that direction. It
then sets the velocity relative to the distance remaining. A
larger distance, the faster the robot will explore. A
shorter distance, the more careful it will be. The behavior
sleeps for a certain period of time, and then restarts from
the beginning. Explore is not a wall following algorithm,
rather it relies on random movement to successfully cover an
area. It also relies on AvoidObject to repel itself away
from walls.
-
AvoidObject
The AvoidObject behavior is
written to determine how the robot should react to close
objects. It first determines the the nearest and furthest
sonar sensoR reading. If the nearest obstacle is within a
minimal threshold, then thE AvoidObject behavior knows it
needs to intervene and cease all other behaviors. If the
farthest obstacle is still within our minimum allowable
distance, then the robot must turn around (facing a
wall/corner). Otherwise we turn towards the direction of the
sonar that is detecting the farthest distance. Once the
AvoidObject behavior determines that it is safe, it resumes
all other behaviors.
Source
Code:
Summary
The Pioneer came with code for basic motion but
we thought it better to start from the ground level and build
up. All communication was written and conformed to the serial
control spec for the pioneer robot. It now moves forwards,
backwards, can rotate, and the grippers can be operated upon.
The Pioneer will wander randomly according to the Explore
behavior and will try to avoid obstacles based on the
AvoidObject behavior. The gripper opens and closes according
to command as well as moves up and
down. | |
|
|
|
|
Project 2
The Goals
The goals of this project include:
-
Get the sonar processing behavior to work
-
Implement the speech package
-
Set up the USB camera and write a behavior
that will retrieve images
-
Change the navigation from a relative
velocity implementation to a translational velocity
implementation
Our Work
The first goal we tackled was getting the sonar
processing behavior to work. The Pioneer has 7 sonar
transducers (0-6). Previously we would determine a
transducer's value by storing several values in an array and
then averaging them to determine a final value. This caused
some problems due to the fact that the transducers will often
record random bad values. We attempted to solve this problem
by determining the standard deviation of the values in the
array and then throwing out any new values that were not
within the standard deviation. This filtering schema turned
out to be too conservative as legitimate values recorded when
the robot was moving quickly or turning were being thrown out.
Finally we came up with the idea of having two arrays for each
transducer, one that stores the legitimate sonar values and a
"buffer." When a new value is obtained by the transducer the
program checks it against the previously stored value in the
sonar array. If the two values are within a certain threshold
the new value is added to the sonar array. If they are not
within the threshold, the new value is placed in the buffer
array. Then the transducer obtains another sonar value. If
this second sonar value is within the threshold it is added to
the sonar array and the buffer is deleted. If it isn't within
the threshold it's compared to the previously stored value in
the buffer array. If those two values are within a threshold
they are both copied into the sonar array. If they aren't
within a threshold the new value is added to the buffer array.
If the buffer array ever becomes full it is copied into the
sonar array. For example:
say that the threshold has been set to 2, and
that the sonar array for a transducer is the following:
Say that the buffer array is empty:
Now, when compared to the last value in the
sonar array, the next value we get from the transducer can
either be within the threshold or outside the threshold. If
it's within the threshold it's just added to the sonar array.
It it's ouside of the threshold it's added to the buffer
array. So if our next value was 4, we'd have:
Now, one of two things can happen. The next
value can either be within or ouside the sonar threshold. if
the next value is within the sonar threshold, it's copied into
the sonar array and the buffer is deleted. So if the next
value was 6 we'd now have:
However, If the next value was outside the
sonar threshold it would be compared to the last value in the
buffer array (in this case, the 4). If it is within the
threshold in the buffer array, both values are copied into the
sonar array and the buffer array is deleted. So if our next
value was 3, we'd get:
But if our next value isn't within the buffer
threshold, it's just added to the buffer. If the buffer
becomes full (which would happen if successive values continue
to be outside the threshold), the buffer is just copied into
the sonar array. This particular situation tends to happen
when the robot is turning. So if our next value was 1, we'd
have:
I hope that wasn't too confusing.
The next task we worked on was setting up the
USB camera. It turns out that surprise, surprise, Video for
Linux doesn't work under FreeBSD. The easiest solution (we
thought) to this problem was to install Linux on the laptop
and just run Linux. This turned out to be more complicated
than expected (see the Problems Encountered section), but
eventually we got Linux up and running and our vision behavior
retreiving images. The vision basically behavior works by
reading in and displaying frames taken from the camera.
Our next goal was to get the Festival speech
package working. Originally we implemented Festival under
FreeBSD. It worked except that FreeBSD doesn't have an audio
driver so we never actually heard what the program was saying.
Once we got Linux installed and twiddled with some libraries
Festival worked just fine.
Our last task was to change the navigation from
a relative velocity implementation to a translational velocity
implementation. We felt that doing this would result in a less
spastic motion. This appeared to be a relatively easy task
considering that there is a built in command for translational
velocities. After having some problems with command packet
specifications, the translational velocity implementation
appears to work. One the next things we're going to do is test
the translational velocity functions more extensively.
Although it wasn't one of our goals we ended up
mapping out almost all of the bytes in the SIP packet (the
information packet we recieve from the robot). From this we
were able to figure out how to tell when the bump sensors have
been hit. We used this information to develop a collison
behavior. We were also able to determine that the forward
break beam in the gripperdoes not work (due to a hardware
problem) but the back break beam does. We used this
information to make a grasp behavior that controls the
gripper. Now the gripper will pick up objects whenever its
back break beam is tripped.
You can find a copy of our code here
Problems We Encountered
The major problem we encountered was that video
for Linux does not work under FreeBSD. Therefore, in order to
get the video for Linux code working so that we could capture
images, we had to install Linux on the laptop. The big
advantage of installing Linux was that we got the Festival
Speech package working so that you could actually hear what
the program was saying. The big disadvantage was that it took
a week and a half to get Linux on the machine and another half
week to get our code to compile.
The next problem was that we couldn't get the
Festival package to compile under Linux. It turned out that
there were name space issues between Festival, stl, and
string. Once we resolved those issues Festival worked just
fine.
We are still encountering problems with lag
time. We've reduced the lagtime significantly from ~10 seconds
to ~.1 second. This is acceptable for our purposes, but when
we get a large amount of traffic over the serial port we lose
sync. When sync is lost we end up re-obtaining a lag time of
~10 seconds. In order to fix this we have two options: fiddle
around with sleep times and see if we can find some magic
number that works, or include a time variable in robot control
to indicate the last time data was taken. This second solution
seems to be rather ugly and tedious so hopefully we will be
able to make the first solution work.
The next problem we encountered was that our
program kept causing segmentation faults whenever we tried to
run our vision behavior. When we commented out our vision
behavior the program segmantation faulted when we tried to
quit it. It turned out that we were trying to do a string
concatonatinon without enough memory. We fixed the problem by
declaring a new string of larger length.
Evaluation
In terms of meeting our goals we did rather
well. Our laptop now runs under Linux and the USB camera and
the Festival Speech package both work. Our vision behavior
works and our robot's navigation was successfully changed to
translational velocities from relative velocities. Even though
they weren't part of our original goals we were able to
develop collision and grasp behaviors using the information we
found from mapping out nearly all of the bytes in the SIP
packet.
The Pioneer in Action
Here are some pictures of the Pioneer:
 |
This is a side view of the Pioneer. The
little gold circles are the sonar devices and the white
thing on the top pointing at the coke can is the USB
camera. For all of these pictures you can click on the
thumbnail to see a larger image. |
|
This is another side view of the Pioneer
but with the laptop mounted on its back. This is how the
Pioneer will be configured when it is running. |
 |
 |
This is a front view of the Pioneer. You
can see 5 of the 7 sonar devices, as well as the USB
camera. |
|
This is a snapshot from the USB camera
showing a coke can located a couple of feet in front of
the robot. As you can see we will have the camera
configured so that it should be able to see an object
from several feet away, but it won't be able to see the
object when the object is on the floor butted up against
the robot. |
 | | |
|
|
|
|
Project 3
The Goals
The goals of this project include:
-
Implement a keyboard interface to the robot
that will allow us to control the direction and velocity of
the robot (for testing purposes)
-
Use the interface to extensively test our set
translational velocity algorithm (this was mentioned as a
future goal in the last project)
-
Get the avoid walls behavior to work
-
Write software that will allow the robot to
identify coke cans and head towards them
Our Work
The first goal we worked on was implementing
keyboard control of the robot's velocity and direction. This
was accomplished by adapating Solaris code written by
Professor Dodds.
The second goal we worked on was using the
keyboard interface to extensively test our set translational
velocity algorithm. Originally, empirical testing led us to
believe that there was a physical maximum velocity of about
511 mm/sec. We set this number as a constant called
MAX_VELOCITY and sent velocity values to the robot by
multiplying MAX_VELOCITY by a positive or negative fraction of
1 and dividing that by 4. (The robot takes in the velocities
as 2 bytes which are then multiplied by 4mm/sec) After the
software for the keyboard control was implemented, testing of
our set velocity algorithm immediately showed a problem.
Although setting foward velocities appeared to work correctly,
anytime we tried to change direction and move backwards the
robot would speed up to MAX_VELOCITY and continue moving
forwards. More testing showed that we were incorrect in our
perception of how the robot accepts velocity values. It turns
out that for each byte, the first bit controls if the
direction is forward (0) or reverse (1). The rest of the bits
control the magnitude of that direction in the following
manner:
Modifying our set velocity algorithms to
conform to the above format seems to have fixed our problems.
Unfortunately, reverse engineering the process to convert the
velocity values sent back by the robot turned out to be more
difficult than we originally thought. Fixing this conversion
problem is one of the first things we want to address in the
next project.
Next we worked on getting our avoid walls
behavior to work. Originally, we thought that the problem
might reside in the sonar. The first thing we wanted to do was
figure out a way to display the sonar data so that we could
see what the robot was "seeing." This was accomplished by
writing a GUI that displays the sonar data for each transducer
as a cone. The size and color of the cones are a function of
sonar magnitude. After using the GUI to test the sonar, we
discovered that there appears to be a delay in the sonar
processing software. More testing leads us to believe that the
origin of this delay may be the massive amount of processing
power that the GUI itself requires. So, although the GUI was a
good idea and looks spiffy, it may have harmed us more than it
helped us. After testing the sonar some more we are pretty
certain that it works and that our problems with the avoid
walls behavior are being caused by the incorrectness of the
velocities that are being returned by the robot.
The last thing we worked on was writing
software that will allow the robot to identify coke cans and
head towards them. The software works by setting color
thresholds and centering the robot on any colors it detects
within the threshold. It appears to be working correctly.
Problems We Encountered
By far the biggest problem we've encountered is
the one we found today - namely that our USB camera has
stopped working. We are not sure what the problem is, but we
think it might have to do with the cable. Until we can get the
camera working (or get a new camera) we won't be able to
progress on the vision aspects of the project.
The next problem we're trying to solve is
converting the velocities sent back by the robot into usable
information. So far the algorithms we've tried have all
failed, and since many behaviors (including avoid walls) needs
to know the wheel velocities that the robot is sending back,
it's crucial that we get this fixed as soon as possible.
Evaluation
Although we don't feel like we got as many
things working in this project as we did in the last one, we
still completed 3 of our 4 goals. We implemented a working
keyboard control of the robot's velocity and direction. We
used the interface to test our set velocity algorithm,
discovered a problem, figured out what was wrong, and fixed
the algortihm. We got the robot to identify coke cans and head
towards them (we'd post pictures or a movie but the camera
isn't working). Even though it wasn't one of our goals we
wrote a pretty spiffy GUI to display the sonar readings. The
only thing we weren't able to do was fix the avoid walls
behavior, but we're fairly certain of where the problem lies.
The only thing we need to do is figure out how to reverse
engineer our set velocity algorithm to convert the velocity
values reported by the robot into usable information. We're
pretty sure once we do that a lot of the problems we've been
having will disappear.
In the next project we'd like to work on
solving our problems with the reported velocities, getting the
camera fixed, and writing firing sequencings for the
sonar. | |
|
|
|
|
Project 4
The Goals
The goals of this project include:
-
Write a neural network to teach the robot how
to avoid walls and wander
-
Get the USB Camera to work
-
Make everything work
Our Work
We decided to bypass the entire problem of
decoding the returned wheel velocities by writing a neural
network that would teach the robot to avoid walls and wander.
The network used back propogation to learn the functional
relationship between sonar readings and desired wheel
velocities. It accomplished this by training off of
approximately 55 possible scenarios. For example, the sonar
actuators on the right side of the robot were reading low, and
the actuators on the left were reading high, the network was
trained to go to the left. The network turned out to be rather
effective at extrapolating solutions to unusual situtations.
For example, wandering around corners was not one of the 55
given scenarios, and yet, on its first try the network
navigated a corner correctly.
We still aren't sure why the USB camera has
been acting up, but if we had to make a guess we'd say it was
the firmware. We're not really sure how to fix this, and since
the camera seems to work more often than not, we just left it
alone.
Integrating everything was one of the most
difficult parts of this project. We were able to get the USB
camera, the behaviors (including the new neural_wander), and
Robot Control all working at the same time. Unfortunately,
Festival conflicted with the Video for Linux so we were not
able to run the speech package in conjuction with everything
else.
One of the things we did that wasn't originally
one of our goals was to write a neural network that learned
the color of the coke can. First a user used cursors and lines
to block off an area inside an image that was "coke." Then the
program took a random 3x3 pixel sample of the image,
determined if it was "coke" (1) or "not coke" (0) and fed
those pixels to the neural network to teach the network what
"coke" was. Unfortunately, the neural network wasn't finished
in time (i.e. it wasn't working effectively enough) to
implement it into this project.
Another thing we worked on was modifying the
bump behavior. Now, instead of just backing up the robot
rotates based on which sonars are registering low values. So
now if the robot hits a wall next to a corner and it's right
side is blocked off, the robot will back up, turn left, and
resume going straight.
Problems We Encountered
The major problem we encountered was avoiding
walls. The neural network works about half of the time in that
the robot doesn't hit any walls. In the cases that the robot
does hit a wall, about half of the time the bump behavior is
effective in moving the robot away from the wall and the rest
of the time the robot gets stuck in a loop, hitting the wall,
backing up, hitting the wall, etc. We think the large majority
of these problems are (again!) stemming from the sonar.
However, we no longer feel that bad values are at fault, but
now we think the problem is bad reflections. Most of the time
when the robot is following the wall the side sonars register
the wall as being there and the robot avoids it. However, if
the robot gets a tad bit off parallel, the side sonar is no
longer perpendicular to the wall. The small change in angle
(~10 degrees) is enough to result in a large
distance-to-the-wall difference which causes the sonar to
think that the wall is no longer there. Consequently, the
robot continues on course and ends up running into the wall.
We're not quite sure how to fix this except to invest in one
of those nice laser range-finders.
Our camera still acts schizophrenic from time
to time, which can be a problem (like when it stops working
right before a presentation...) Again, we're not sure how to
fix this (or if we can fix this).
In general, our vison software is pretty
effective. For example, during pre-frosh weekend one of the
prospective students tried to confuse the Pioneer during a
trial by placing a Dr. Pepper can next to the coke can. The
Pioneer completely ignored the Dr. Pepper can and went
straight towards the coke can. It turned out that the network
did pick up some (~5) pixels on the Dr. Pepper can that were
coke colored, but there were so many more pixels that matched
on the coke can that the Pioneer headed towards it instead.
The problem is flesh tones and wood tones. Flesh tones and
wood tones seem to contain the same R value as the coke can
and as a result the Pioneer loves to run towards doors and
legs. Our solution to this was to aim the camera as low as
possible to the ground.
Evaluation
Well, it's been quite a semester. The one thing
we'd change if we could would be to add a heuristic avoid
walls algorithm - something the neural network could fall back
on. In general we're pretty pleased with our work. We were
able to write (modular!) software from scratch based on
subsumption architecture that produced an emergent behavior of
finding coke cans. By writing a new Robot Control we can
implement our software on any robot, and by adding (or
subtracting) behaviors we can completely change the emergent
behavior.
We're a little bit disappointed that we weren't
able to integrate the GUI or the speech package into our final
product, but these are always things we can try and implement
next year. Also we never got around to writing a "return to
base" algorithm - that might also be something we could work
on next year. I'd also like to come up with a more permanent
solution to the USB and sonar problems (like getting a new
camera and adding IR sensors to the robot). At any rate, we
still have a lot to look forward to next
year. | |
|
|
|
|
Presentation
Our Pioneer project was presented at Harvey
Mudd College's Presentation Days 2001. Here are the slides
from the presentation.
If you're using Netscape (which is awful at
supporting fancy things like CSS and DHTML), you can download
the PowerPoint version of our
presentation slides.
We were also able to obtain several movies of
the pioneer in action.
-
Wall
Hit - This movie shows some of the problems we've had
with the Pioneer hitting walls.
-
Color
Problems - This movie illustrates the problems we've had
with the vision software being confused by flesh tones.
-
Wall
Avoid - This movie shows the Neural Network working and
a wall being avoided.
-
Success!
- This movie shows the Pioneer navigating a corner of the
hallway and picking up a coke can.
| |
|
|
|
|
|
| |





